
Carter Sifferman
Computer Scientist
Madison, Wisconsin
I am a Machine Learning Engineer at
Blue River Technology, working on computer vision for agricultural robotics.
Previously, I completed my PhD
at the University of Wisconsin - Madison, advised by
Michael Gleicher and
Mohit Gupta, where I worked on computer
vision for robotics, particularly with miniature LiDAR sensors.
I'm proud of the videos I've made communicating my PhD research,
which have graciously been picked up by the YouTube algorithm.
You can check them out here,
here,
and here.
Experience
Machine Learning Engineer — Blue River Technology
Computer Vision for Agricultural Robotics
Applied Scientist II Intern — Amazon Robotics
Computational Imaging for Automation
Machine Vision Research Intern — CyberOptics
Computer Vision for Industrial Inspection
Publications
ICCV 2025
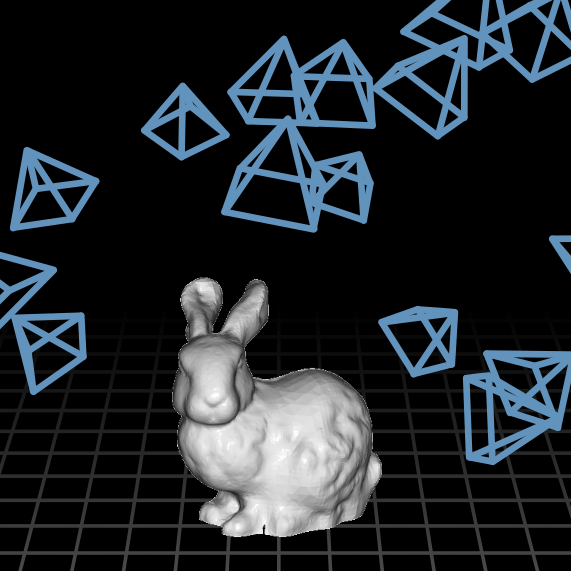
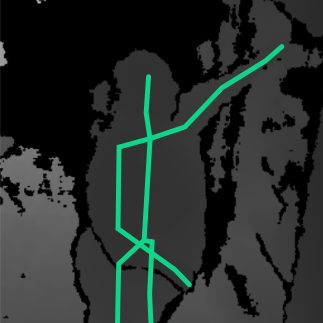
Recovering Parametric Scenes from Very Few Time-of-Flight Pixels
Carter Sifferman*, Yiquan Li*, Yiming Li, Fangzhou Mu, Michael Gleicher, Mohit Gupta, Yin Li
We recover 3D parametric scenes (e.g. 6D object pose, human hand pose) from 15 or fewer total time-of-flight pixels.
RA-L 2025
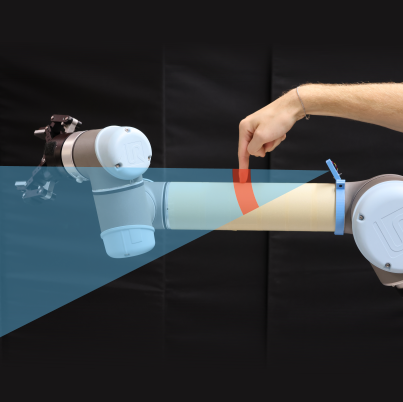
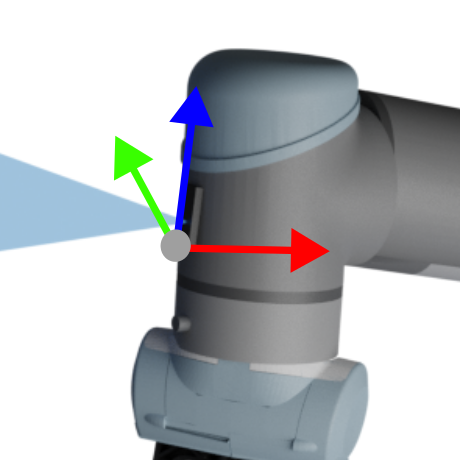
Efficient Detection of Objects Near a Robot Manipulator via Miniature Time-of-Flight Sensors
Carter Sifferman, Mohit Gupta, Michael Gleicher
We use low-level time-of-flight data to enable efficient sensor positions not previously possible.

RA-L, In Proc. ICRA 2025
Using a Distance Sensor to Detect Deviations in a Planar Surface
Carter Sifferman, William Sun, Mohit Gupta, Michael Gleicher
We detect deviations in a planar surface over a wide field-of-view using an off-the-shelf proximity sensor.
CVPR 2024
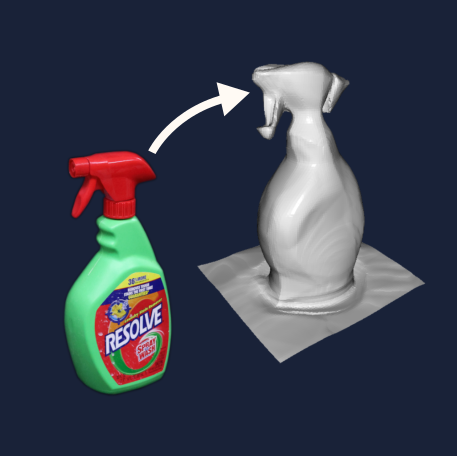
Towards 3D Vision with Low-Cost Single-Photon Cameras
Fangzhou Mu*, Carter Sifferman*, Sacha Jungerman, Yiquan Li, Mark Han, Michael Gleicher, Mohit Gupta, Yin Li
We reconstruct 3D geometry from measurements of a miniature proximity sensor.

ICRA 2024
IKLink: End-Effector Trajectory Tracking with Minimal Reconfigurations
Yeping Wang, Carter Sifferman, Michael Gleicher
A method for tracking end effector trajectories while taking minimal breaks to reconfigure the arm position.
RA-L, In Proc. ICRA 2023
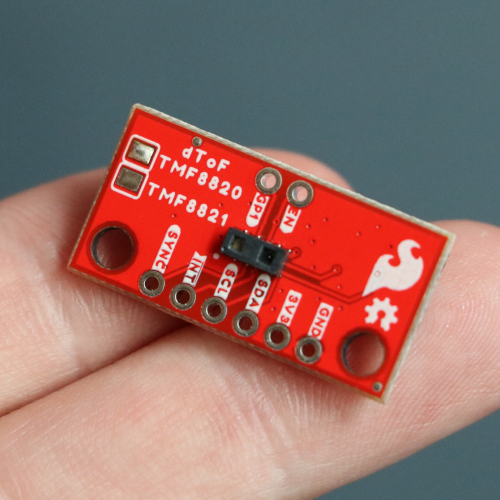
Unlocking the Performance of Proximity Sensors by Utilizing Transient Histograms
Carter Sifferman, Yeping Wang, Mohit Gupta, Michael Gleicher
Directly utilizing low-level information generated by optical time-of-flight sensors allows recovery of planar geometry and albedo from a single sensor measurement.

IROS 2023
Exploiting Task Tolerances in Mimicry-based Telemanipulation
Yeping Wang, Carter Sifferman, Michael Gleicher
Allowing a robot to move freely in non task-relevant degrees of freedom improves the telemanipulation experience.
RA-L, in Proc. IROS 2022
Geometric Calibration of Single Pixel Distance Sensors
Carter Sifferman, Dev Mehrotra, Mohit Gupta, Michael Gleicher
A depth sensor attached to a robot arm can be extrinsically calibrated relative to that robot arm using only an unknown planar surface.
Bioinformatics and Biomedicine (BIBM) 2019
Depth Sensor-Based In-Home Daily Activity Recognition and Assessment System for Stroke Rehabilitation
Zoë Moore*, Carter Sifferman*, Shaniah Tullis*, Mengxuan Ma, Rachel Proffitt, Marjorie Skubic
A system for automatic assessment of stroke patient recovery (e.g. range of motion), using an in-home depth camera.