Plant Segmentation Final Project for CS 639 Computer Vision
Marianne Bjorner and Carter Sifferman
Github Repository / Project Proposal / Midterm Report / Final Presentation / Final Presentation Video
Introduction / Motivation
Current methods used to assess plant growth and phenotype in botany experiments are time-consuming and laborious. Using image segmentation techniques to replace manual plant measurements would increase automation and decrease needs for destructive sampling, thus decreasing labor and cost.
Of those algorithms available, many have been developed and tested on datasets available from the European Conference on Computer Vision’s (ECCV) workshop on Computer Vision Problems in Plant Phenotyping (CVPPP). The dataset comprises overhead images of two species (of genera Arabidopsis and Nicotiana), commonly used as model organisms for botany and horticulture experiments. Given this limited dataset, we wanted to expand the range of available plant and image types to evaluate the differential performance of segmentation algorithms.
Goals
- Implement image segmentation algorithm(s) on overhead images of seedlings and smaller, vegetative plants,
- Develop a dataset of variable plant images,
- Evaluate methods of existing segmentation algorithms,
- Create our own segmentation algorithms, and
- Compare performance of different plant-background segmentation algorithms.
Related Work
Existing approaches to the plant and leaf segmentation problem proposed by CVPPP include:
- Yin et. al.’s PlantVision, which performs joint multi-leaf segmentation on fluorescent plant images using template matching.
- Kuznichov et. al.’s Data Augmentation for Leaf Segmentation and Counting Tasks in Rosette Plants, which segments and counts leaves using the Matterport implementation of Mask R-CNN, a Convolutional Neural Network.
- Pape and Klukas (2015) 3-D Histogram-Based Segmentation method which transforms RGB images into L* a* b* color space, and then generates separate 3-D histograms of the foreground and background for segmentation.
Outside the realm of CVPPP, plant leaf segmentation has also been explored in the context of plant identification. It has been integrated into apps such as LeafSnap, in which individual leaf photos are used for species identification.
CVPPP2017 Dataset
The CVPPP2017 Dataset is a collection of overhead images of Arabidopsis and Tobacco plants, which are both leafy, green dicotyledons and have a rosette structure, meaning they grow in a circular pattern. Because of these features, the CVPPP dataset is not variable, and would be insufficient to test the broader applicability of phenotyping algorithms.
Our Dataset
This vacuum in available plant image data led us to develop our own dataset comprised of more challenging plant photos. Some features of these plants and photos include:
- Leafy Plants, Grasses, Succulents
- Non-rosette structures
- Non-green plants
- Indoors and Outdoors
- Bright and Dim Light
- Shadow Effects
- Challenging backgrounds
- Green Backgrounds
- Backgrounds with Leaves not belonging to the plant
- Backgrounds with other variation
This dataset is comprised of 68 overhead plant images as well as their annotated binary mask counterparts. Binary masks created with Photoshop and GIMP. Each is 500x500 pixels, and a tags.json file is included to differentiate plant and image features, useful for testing an algorithm against a subset of image categories.
Implementing Existing Algorithms
PlantVision
Developed as Joint Multi-Leaf Segmentation, Alignment, and Tracking for Fluorescence Plant Videos, this tackles the problem of plant leaf segmentation and counting from fluorescent images, with the option of counting them over multiple frames to create a tracked “video” of plant growth.
The original PlantVision algorithm applied multiple filters (e.g. Gaussian followed by a 2-D median filter) before creating an edge image, and then applies chamfer matching using leaf templates which match the input images’ rosette leaf structures of arabidopsis and tobacco plants.
Difficulties Encountered / Caveats
Because this was developed for fluorescent images of plants, RGB inputs of images needed heavy alteration, and the inbuilt thresholding mechanisms of the algorithm required changes as well. Despite these changes, the algorithm managed to recover few leaves from RGB images, in many cases resulting in blank binary masks.
These changes are reflected in both the image input and entrance file of the original PlantVision algorithm.
Our Segmentation Approaches
Green Channel Thresholding
A green channel tresholding algorithm was implemented as a baseline. This approach rests on the assumption that - hey! plants are green! - and therefore images of plants can be separated based on how green these pixels are.
| RGB image | Ground Truth Binary Mask | Green Threshold Result |
|---|---|---|
 |
 |
 |
Difficulties Encountered / Caveats
Many obvious pitfalls occur when classifying leaves solely using a single green channel’s values. This approach fails readily. Green backgrounds and bright colors result in false positives. Additionally, this approach does not work on images of non-green plants.
K-means Clustering
K-means Clustering creates a set of k clusters of datapoints, or in this case pixels, which minimizes the within-cluster variance of the clusters in an iterative fashion until convergence is reached.
| RGB image | Ground Truth Binary Mask | Intermediate KMC Result | K-Means Clustering Result |
|---|---|---|---|
 |
 |
 |
 |
Difficulties Encountered / Caveats
Due to its reliance on RGB values of pixels, as k increases, it approximates the per-pixel logistic regression method.
Per-Pixel Logistic Regression
Python package sklearn’s LinearRegression tool was used to train a model on CVPPP2017 data. It recovered the following equation:

These also use the values of the RGB channels, applying a negative weight to red and blue channels, and a positive weight to the green channel. If the pixel meets a threshold, it is classified as a plant pixel; background otherwise.
| RGB image | Ground Truth Binary Mask | Per-Pixel Logistic Regression |
|---|---|---|
 |
 |
 |
Difficulties Encountered / Caveats
Some photos had background noise, where false positives were recovered in the soil surrounding the plant.
| RGB image | Ground Truth Binary Mask | Per-Pixel Logistic Regression |
|---|---|---|
 |
 |
 |
Smoothed and Denoised Per-Pixel Regression
To address the noise in resulting masks of the per-pixel logistic regression, binary masks were post-processed in an attempt to remove background noise.
| RGB image | Ground Truth Binary Mask | Smoothed and Denoised Per-Pixel Logistic Regression |
|---|---|---|
 |
|
 |
Difficulties Encountered / Caveats
In some cases, smoothing and denoising resulted in strange artifacts, and led to a higher number of falsely identified plant pixels.
Results
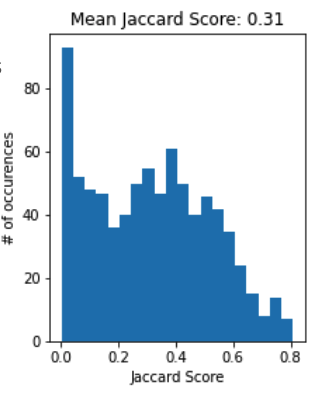
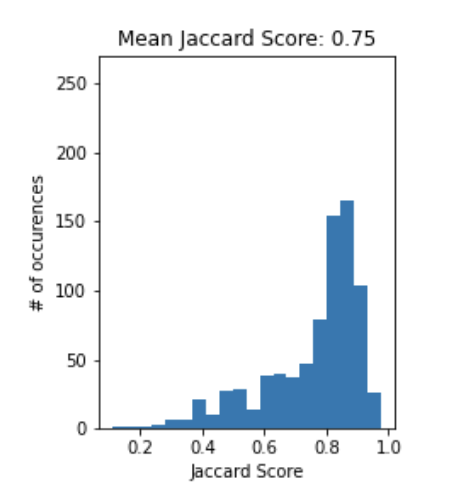
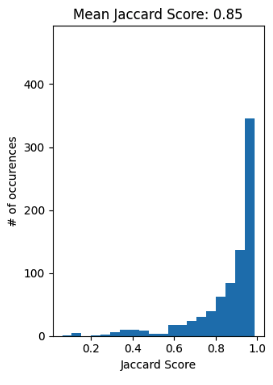
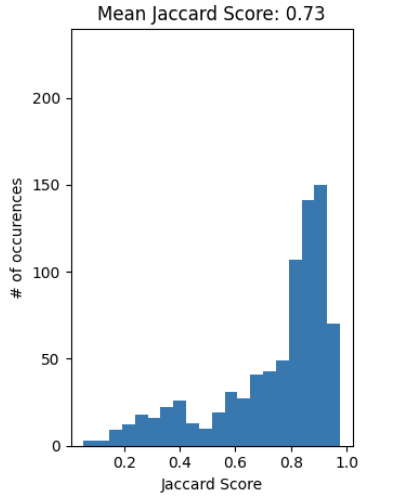
We analyzed our results by assigning a Jaccard Index to each image. The Jaccard Index, also known as intersection over union, compares the binary mask output of each algorithm and compares them to the ground truth masks.
Calculations of Jaccard Index and Dice Coefficient driven by evalutate_segmentation.py
Jaccard Index by Method and Dataset
| Method | CVPPP2017* | Our Dataset |
|---|---|---|
| Green Threshold | 0.31 | 0.32 |
| Per-Pixel Regression | 0.75 | 0.56 |
| Per-Pixel Regression + Smooth | 0.85 | 0.66 |
| K-Means Clustering | 0.73 | 0.45 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
* Links lead to result graphs
Conclusions / Future Work
Our methods focus on a pixelwise classification to segment plants from their backgrounds. This can be extended and refined through additional input image and binary mask manipulation. However, it is important to acknowledge that as the parameters increase, so does the performance of a segmentation. Additional local parameters could include brightness, texture, or position. Others which are specific to plant structure include correlation to a template, proximity to an edge, angle between leaves, or distance between leaves. While the present algorithm could easily be extended to track phenotypes related to size and green-ness of the plant (a proxy for health and chlorophyll content), another datapoint of interest is also leaf number.
With such additional parameters, individual leaf segmentation and tracking would also be possible. Of the algorithms we implemented, k-means clustering was the most promising, as the clustering performed is analagous to leaf segmentation. Of course, there are other methods used for image segmentation such as Mean Shift.
Another approach would be to use feature detection methods to segment leaves, such as SIFT.
The current state-of-the-art includes high-performing algorithms that commonly fall above a Jaccard Index of 0.95. These commonly utilize a convolutional neural network, such as that in Kuznichov et. al.’s Data Augmentation for Leaf Segmentation and Counting Tasks in Rosette Plants. This approach used the matterport implementation of Mask R-CNN, which is available on Github.
References
1 Computer Vision Problems in Plant Phenotyping
2 PlantVision Github Repository
3 Yin X, Liu X, Chen J, and Kramer DM. Joint Multi-Leaf Segmentation, Alignment, and Tracking for Fluorescence Plant Videos. 2018. IEEE Transactions on Pattern Analysis and Machine Intelligence.
4 Kuznichov D, Zvirin A, Honen Y, and Kimmel R. Data Augmentation for Leaf Segmentation and Counting Tasks in Rosette Plants. 2019. The Computer Vision Foundation
5 Matterport Github Repository for Mask R-CNN
6 Pape JM and Klukas C. 3-D Histogram-Based Segmentation and Leaf Detection for Rosette Plants. 2015. ECCV 2014. Springer. pp. 61-74.
7 LeafSnap application webpage
8 CVPPP2017 Dataset
9 Ute Kramer. The Natural History of Model Organisms: Planting molecular functions in an ecological context with Arabidopsis thaliana. 2015.
10 Shibayama M, Sakamoto T, Takada E, Inoue A, Morita K, Yamaguchi T, Takahashi W and Kimura A. Estimating Rice Leaf Greenness (SPAD) Using Fixed-Point Continuous Observations of Visible Red and Near Infrared Narrow-Band Digital Images 2012. Plant Production Science. pp. 293-309.
11 He K, Gkioxari G, Dollár P, and Girshick R. Mask R-CNN. 2017. IEEE.
Resources:
1 Github Repository
2 Project Proposal
3 Midterm Report
4 Final Presentation
5 Final Presentation Video
6 CVPPP2017 LSC Dataset
7 Our Dataset